AI-driven generative design is transforming tool creation and optimizing them for real-world tasks. This post explores methods for generating articulated objects, refining designs through physical iteration, and automating robotic tool creation.
Robots exploring distant planets might one day carry 3D printers on their backs, autonomously designing and creating tools to solve novel challenges they encounter. How close is this kind of goal-specific tool generation to reality?
In a system for generative tool design, task specification, multi-domain knowledge, and design constraints are input, and optimal designs (or an optimal design space) are output. Generated tools not only have to work in simulation but also be feasible to fabricate and function in the messiness of the real world. Potential approaches include generating articulated objects, physical iteration and testing towards a specific goal, tool shape to optimize interactions, and generating robots optimized for specific tasks.
Articulated Objects
Articulated objects consist of multiple interconnected parts that can move relative to each other, such as doors, cabinets, and robotic grippers. In generative design, articulating objects means not only generating the shape of each part but also defining the way they move together, such as “a chest you can open.” While research in this area has primarily been focused on improving robot interactions with the human-centered world, it can be inverted for tool design instead.
Source: https://www.cis.upenn.edu/~leijh/projects/nap/
Traditional methods relied on manual modeling or heuristic-based assembly, but new AI-driven approaches synthesize articulation as an intrinsic property of the generated object. CAGE (Controllable Articulation GEneration) tackles this by using a diffusion model conditioned on a part connectivity graph, ensuring that generated objects not only have realistic joint placements and motion constraints but also conform to user-specified articulation types. NAP (Neural 3D Articulation Prior) builds on this by applying a diffusion model over articulation trees, allowing the system to generate novel structures that generalize beyond pre-existing datasets.
Source: https://red-fairy.github.io/physpart-webpage/
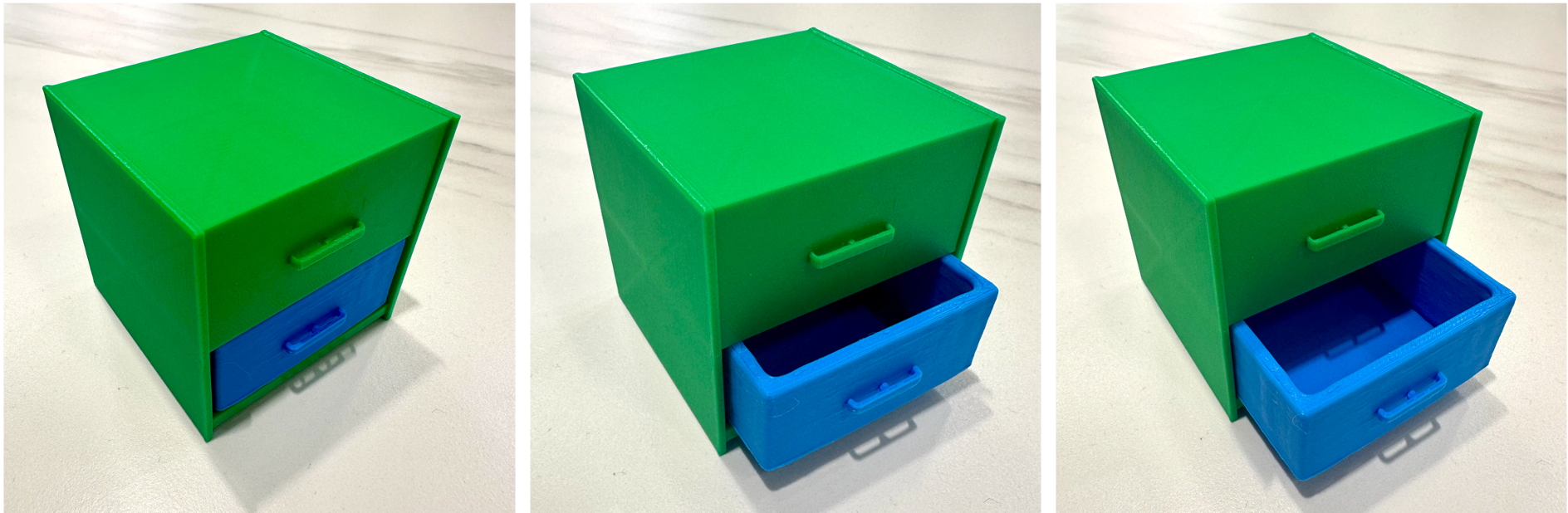
PhysPart takes this a step further by incorporating physical feasibility directly into the generative process, introducing stability and mobility losses to ensure that articulated parts function correctly in the real world. By enforcing physical constraints during generation, PhysPart produces designs that can be directly fabricated and tested, demonstrating 3D-printed results of generated objects such as hinge mechanisms and drawers that move smoothly when assembled.
Unlike the methods above, which generate a fully articulated 3D model directly from input constraints, an alternative approach would be to design a modular pipeline where the image and 3D model generation steps remain interchangeable, allowing for greater control over the final design. Instead of producing articulation as part of the initial generation process, this approach would first generate a base shape and then use methods like Anymesh or URDFormer in a final step to add articulated functionality, ensuring that movement constraints and joint placements can be fine-tuned separately from the object's overall geometry.
Physical Iteration
Source: https://paperbot.cs.columbia.edu/
Rather than relying on simulation, physical iteration methods generate and refine tool designs directly in the real world, using real-time feedback to optimize functionality. Paperbot illustrates this approach by using a robotic system to autonomously design, fabricate, and evaluate paper-based tools for specific tasks, such as folding paper airplanes for maximum flight distance or cutting out optimized grippers for maximum grasping force. The system learns through self-supervised real-world experimentation, testing designs and refining them in a closed-loop process that continuously adjusts folding, cutting, and manipulation steps based on physical results rather than simulated approximations.
This suffers from the same issue that any parametric approach faces, even though it’s moved from CAD to physical space: the possible design space is so huge that the experiment is only feasible within an extremely constrained space of predetermined parameters.
Tool Shape
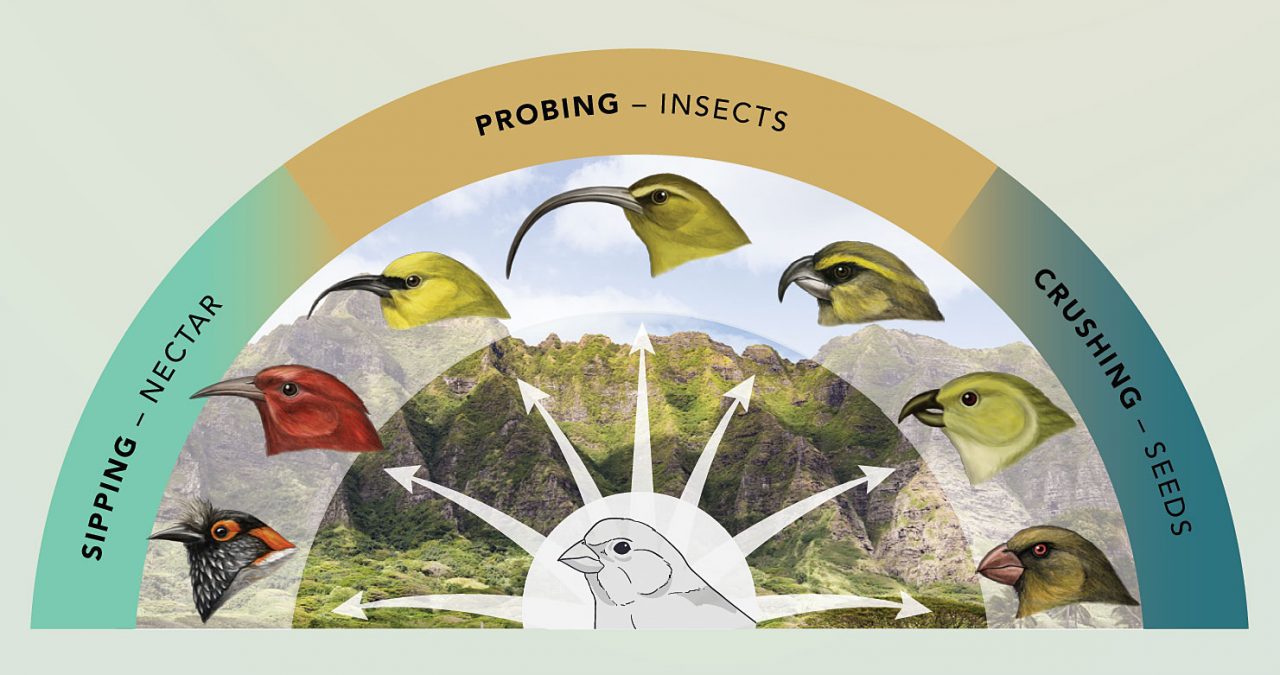
Source: https://www.allaboutbirds.org/news/why-evolution-goes-wild-on-islands-the-science-of-adaptive-radiation/
Bird beaks are evolved for different, highly specific capabilities. Different birds have ideal beaks to break seeds, eat meat, or scoop water. Inspired by nature, methods have been developed to evolve the shape of robotic grippers and end effectors for objects to pick up and situations in which to pick them up. Here, both the interaction and function (picking up an object) are constrained, while the object being picked up and the angle are modified. The problem has been approached for both soft and hard materials.
Source: teaser.gifhttps://fit2form.cs.columbia.edu/
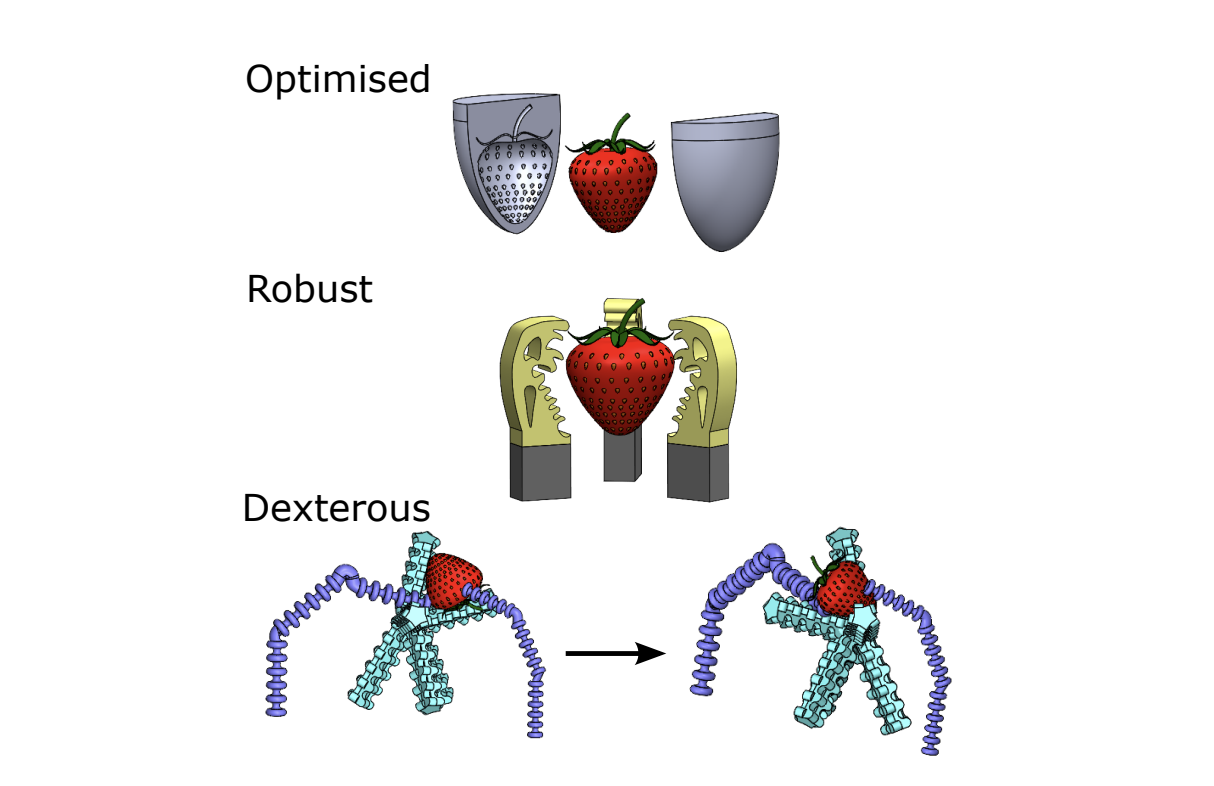
Fit2Form aims to automate the design of gripper fingers by leveraging deep learning to explore a vast design space, ultimately producing finger geometries that are tailored for specific grasping tasks based on a set of performance objectives. This method employs a neural generative model. It trains two main networks: a Generator that produces 3D gripper finger geometries (using TSDF representations) and a Fitness network that acts as a differentiable proxy for grasp quality (evaluating metrics like grasp success, stability, and robustness). The networks are co-trained in a loop where the Generator learns to produce shapes that achieve higher fitness scores as predicted by the Fitness network, effectively navigating a large design space without explicit physics-based simulation of full dynamics.
Towards Bespoke Soft Grippers through Voxel-Scale Metamaterial Topology Optimisation generates both the material design and the gripper’s shape. Blending materials at the voxel level enables the creation of custom metamaterials whose continuously variable properties are optimized alongside the gripper’s overall geometry. The end goal is to produce bespoke soft grippers tailored to specific objects by simultaneously optimizing material distribution and structural form.
Robotics
Source: https://iopscience.iop.org/article/10.1088/1757-899X/1292/1/012009/pdf
In the realm of generative design for robotics, Task-Mediated Design inverts the traditional design process by making the task itself the foundation of the design. Instead of designing a robotic tool first and figuring out how to control it later, this method quantifies the task in a structured way, such as the forces needed to grip a delicate object or the motion required to manipulate it, and generates a tool that naturally performs the task with minimal complexity. By embedding task requirements into a latent space, the system optimizes for function first, ensuring that the resulting designs are inherently well-suited for their intended purpose.
Generative Tool Design in the Real World
While much of this research is still developing, generative tool design is already impacting industries, automating complex engineering tasks and optimizing solutions beyond human intuition.
Source: https://www.nasa.gov/technology/manufacturing-materials-3-d-printing/nasa-looks-to-advance-3d-printing-construction-systems-for-the-moon-and-mars/
In electronics, FlecheTech’s AI-powered PCB design tool translates plain-language specifications (e.g., “measure voltage” or “communicate via Bluetooth”) into optimized circuit layouts in a fraction of the usual design time. Engineers can generate functional PCB designs in days rather than weeks by automating constraint-based optimization.
In healthcare, generative AI is revolutionizing the creation of patient-specific medical devices. AI-driven systems optimize implant geometries for biocompatibility, mechanical stress distribution, and efficient manufacturing, leading to faster prototyping and improved patient outcomes.
Generative mechanical design is also transforming aerospace and automotive engineering. Autodesk’s generative design tools enable engineers to specify functional objectives (e.g., weight reduction, structural strength), allowing AI to generate thousands of potential designs that balance material efficiency and performance. These tools have cut component weights by up to 50%, reducing fuel consumption and production costs in spacecraft, aircraft, and electric vehicles.
Back to space, NASA’s collaboration with ICON on 3D-printed habitats is a step toward autonomous robotic fabrication in extreme environments. Their system, which extrudes structures from Martian regolith-polymer composites, demonstrates how generative design and in situ resource utilization (ISRU) can enable self-sufficient construction on Mars and the Moon. While currently focused on habitats, the same principles could one day allow robotic explorers to generate tools and structures as needed autonomously.